|
isicad.ru :: портал САПР, PLM и ERP :: версия для печати
16 августа 2016 
Характерные задачи динамики аппаратуры в среде SOLIDWORKSМ. Шаломеенко, А. Алямовский, к.т.н., SOLIDWORKS RUSSIAВ статье использованы материалы, полученные в результате совместной деятельности с АНПП «Темп-Авиа», АО «ГРПЗ», ОАО «Концерн НПО Аврора»
К радиоэлектронному оборудованию предъявляются жёсткие требования по сохранению функциональных характеристик в заданном диапазоне эксплуатационных нагрузок, особенно для изделий высокотехнологичных отраслей промышленности. С целью изучения поведения изделий РЭА в динамике, на этапе конструкторской разработки проводятся соответствующие исследования расчётных моделей на действие синусоидальной и случайной вибрации, ударное нагружение и другие эксплуатационные нагрузки. Исследования воспроизводят реальные испытания, выполняемые согласно нормативам. Это позволяет оценить уровень напряжённо-деформированного состояния, ускорений, скоростей элементов модели в динамике и, при необходимости, оперативно внести изменения в конструкцию изделия.
Рассмотрим характерные задачи, возникающие у производителей аппаратуры на стадии подготовки проекта изделия и требующие предварительной оценки вибропрочности и виброустойчивости. Их объединяет наличие расчётной модели изделия, на основе которой выполняются исследования. Предложенные методики реализации подобных задач в модуле SOLIDWORKS Simulation позволяют получить результаты, хорошо согласующиеся с экспериментальными данными.
Отметим, что модуль SOLIDWORKS Simulation приобрел популярность в среде инженеров-расчётчиков как средство для анализа именно радиоэлектронных приборов. Этому в немалой степени способствуют публикации специалистов нашей компании и пользователей о выполненных исследованиях. Как правило, для деформируемых конструкций, где все компоненты неразрывно связаны друг с другом, процесс постановки и выполнения исследования не вызывает затруднений, благодаря удобному интерфейсу и прозрачному функционалу. В случаях, когда в устройствах присутствуют подвижные элементы, в том числе с подшипниковыми узлами или сайлент-блоками, требуются специфические методики построения расчётной модели. Одним из примеров таких устройств является представленный ниже прибор.
Проект предусматривал проведение вибрационных и ударных исследований устройства, содержащего подвижные узлы в подшипниковых опорах, обеспечивающих вращательные степени свободы в двух взаимно перпендикулярных плоскостях (рис. 1).
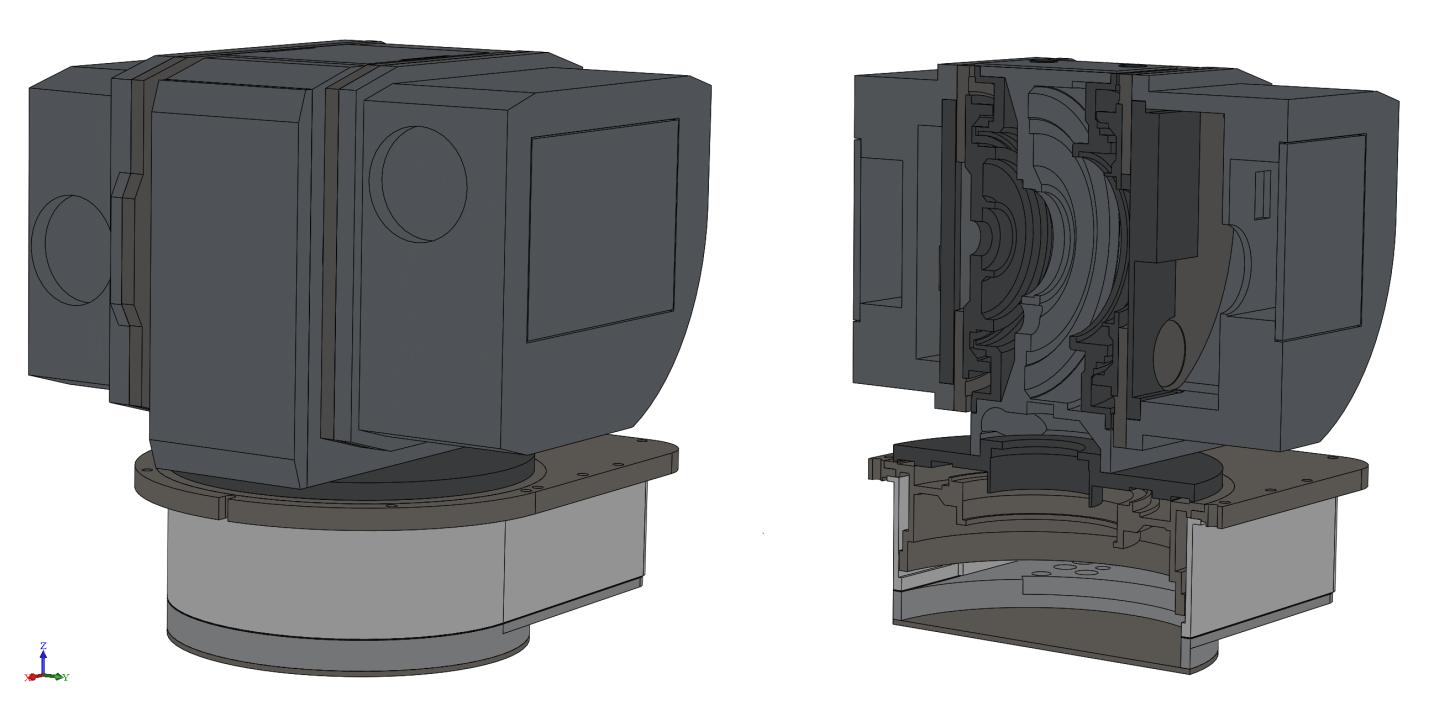
Рис. 1. Общий вид и разрез расчётной модели прибора (внутренние компоненты скрыты)
Разработчик представил конструкторскую модель, которая была адаптирована для выполнения конечно-элементного анализа. Доработки состояли в упрощении геометрии деталей (удаление внешних скруглений и фасок), исключении взаимного проникновения деталей и ликвидации зазоров, не влияющих на общую прочность и жёсткость конструкции. Решались вопросы, связанные с адекватным моделированием скользящих посадок и малых зазоров. Ряд компонентов, представляющих собой сосредоточенные массы, были преобразованы в удалённые, что позволило сократить общую размерность конечно-элементой модели. В местах наибольшей податливости конструкции и на сложной геометрии деталей сетка конечных элементов уплотнялась.
Модели подшипников с телами качения были заменены на упрощённые (с гладкими кольцами без тел качения и сепараторов) с имитацией виртуальными соединителями Подшипник, обладающими жёсткостями в радиальном и осевом направлениях (рис. 2). Эти соединители позволяют управлять также стабилизацией вращения вала (воспроизводится малая жёсткость, препятствующая свободному вращению в отсутствие внешних сил), а также применять самовыравнивание (незначительную изгибную жёсткость) для шариковых подшипников.
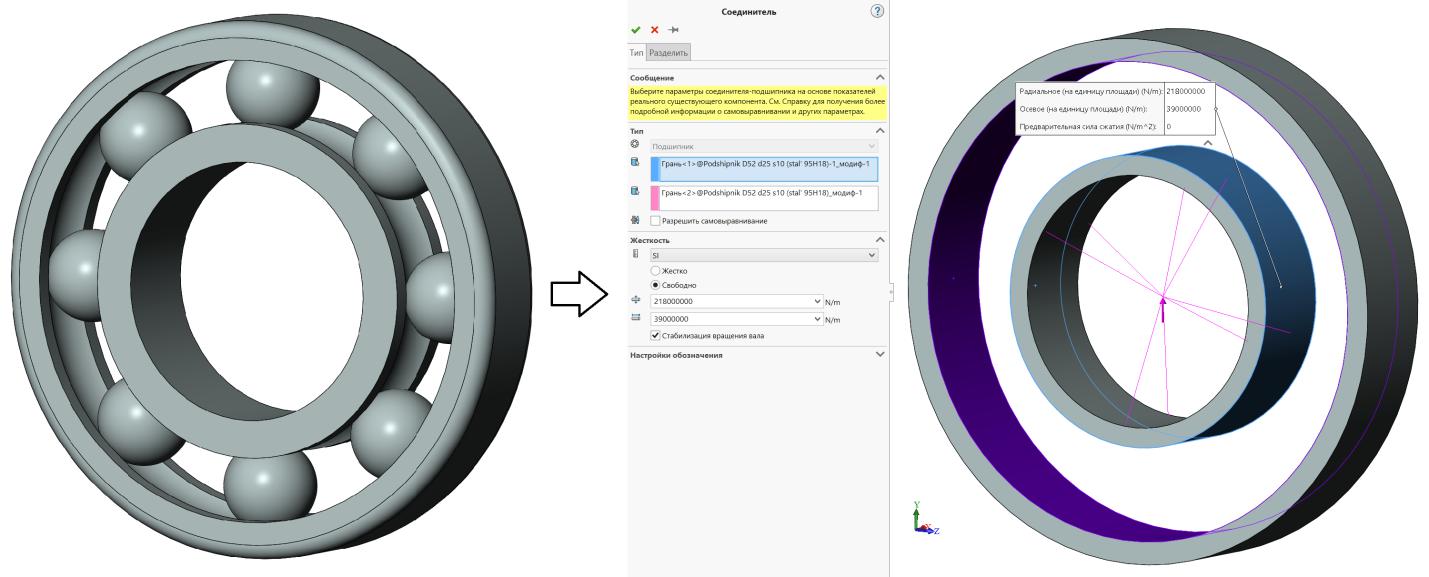
Рис. 2. Замена модели реального подшипника виртуальным аналогом
Как правило, системы с реальными подшипниками демонстрируют нелинейную реакцию на внешние нагрузки за счёт посадок и несовпадения радиусов шариков и канавок, что может проявиться в рассогласовании расчёта и эксперимента. Поэтому рекомендуется проводить уточнение характеристик жёсткости виртуальных подшипников с учётом экспериментальных данных при конкретных условиях работы.
Помимо виртуальных подшипников в данном проекте были исследованы модели с соединителями Пружина (рис. 3), прикреплёнными к кольцам, что позволило получить более точную оценку собственных частот, соответствующих кинематическим модам прибора именно при гармонических нагрузках.

Рис. 3. Соединитель «Пружина»
Для реализации болтовых и винтовых соединений в расчётных моделях линейной динамики, подразумевающей отсутствие нелинейностей, могут применяться соединители Штифт. Они обеспечивают жёсткую связь граней смежных отверстий и обладают осевыми и крутильными жёсткостями.
В результате для проведения динамического анализа прибора была сгенерирована конечно-элементная модель (рис. 4).
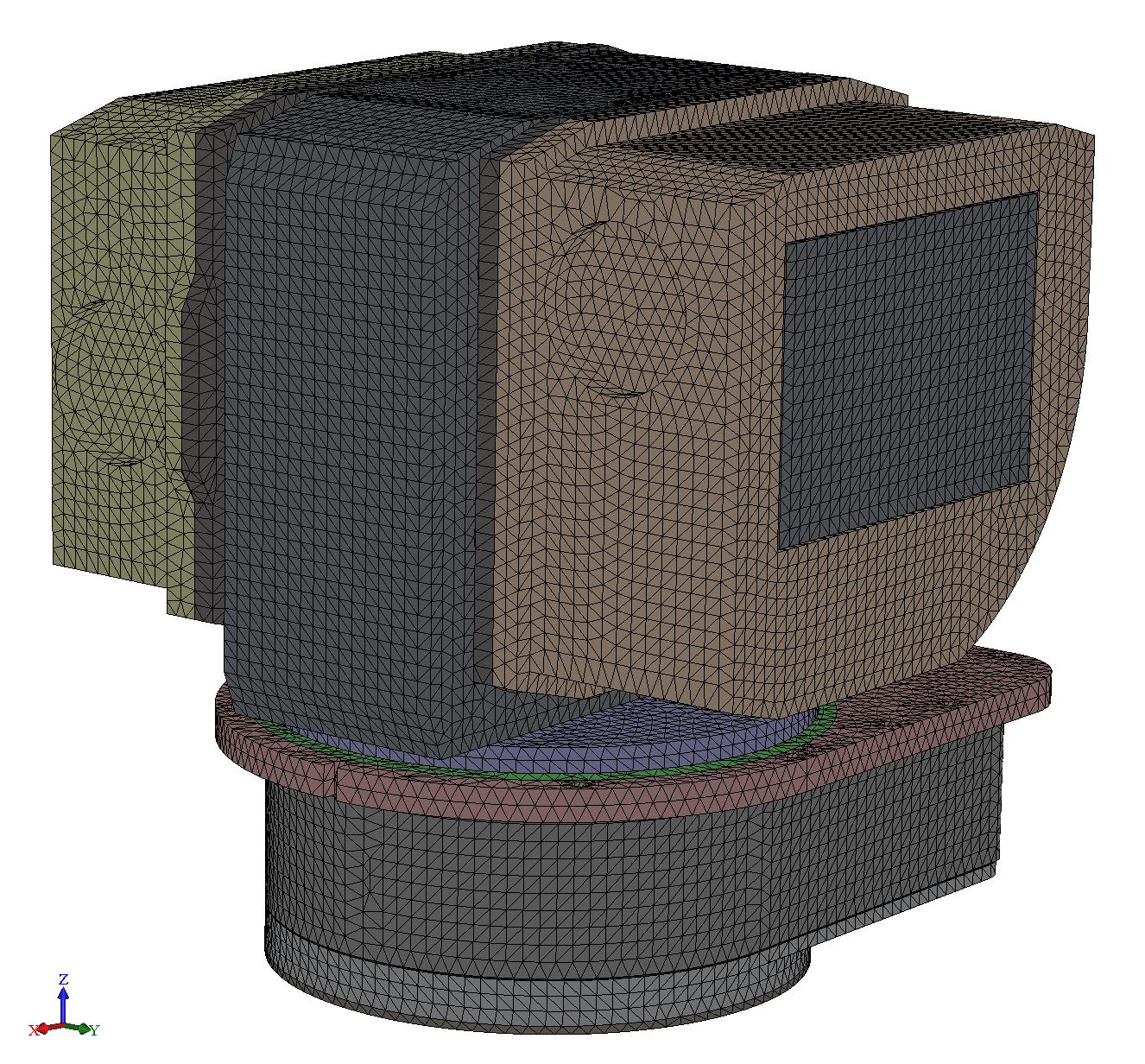
Рис. 4. Конечно-элементная модель прибора
Для расчётных случаев созданы исследования Simulation на действие гармонической вибрации с амплитудой ускорения 0,5 g в диапазоне 5…2000 Гц и одиночного удара с ускорением 75 g в интервале 1…5 мс. Все исследования проводились по трём направлениям осей.
На первом этапе решалась задача нахождения собственных форм и частот изделия – функционал программы позволяет преобразовать частотные модели в динамические с сохранением сетки и результатов по частотам. Как ожидалось, первые собственные формы соответствовали кинематическим модам движения вращающихся узлов (рис. 5).
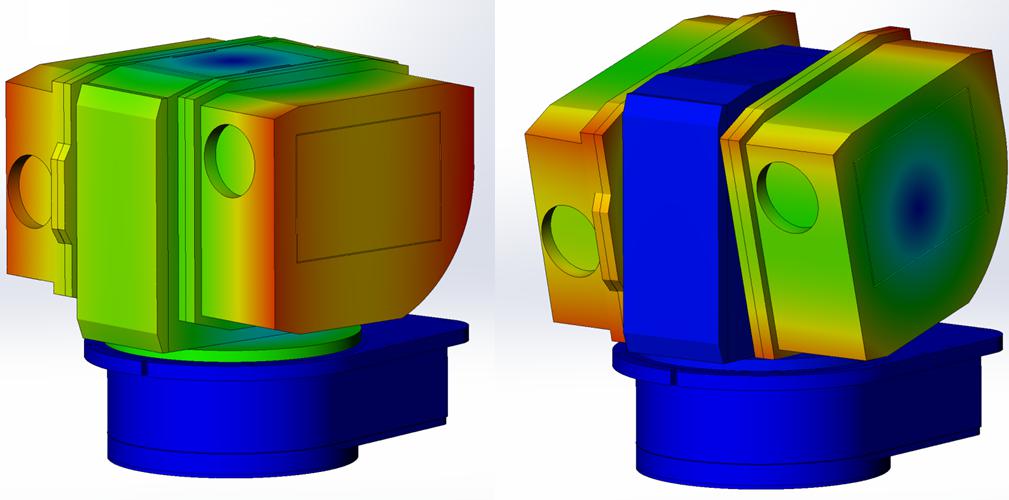
Рис. 5. Собственные формы прибора, соответствующие кинематическим модам
Деформационные собственные формы определяются жёсткостью конструктивных элементов (рис. 6) и связей (мы не приводим численных значений частот и некоторых других параметров).
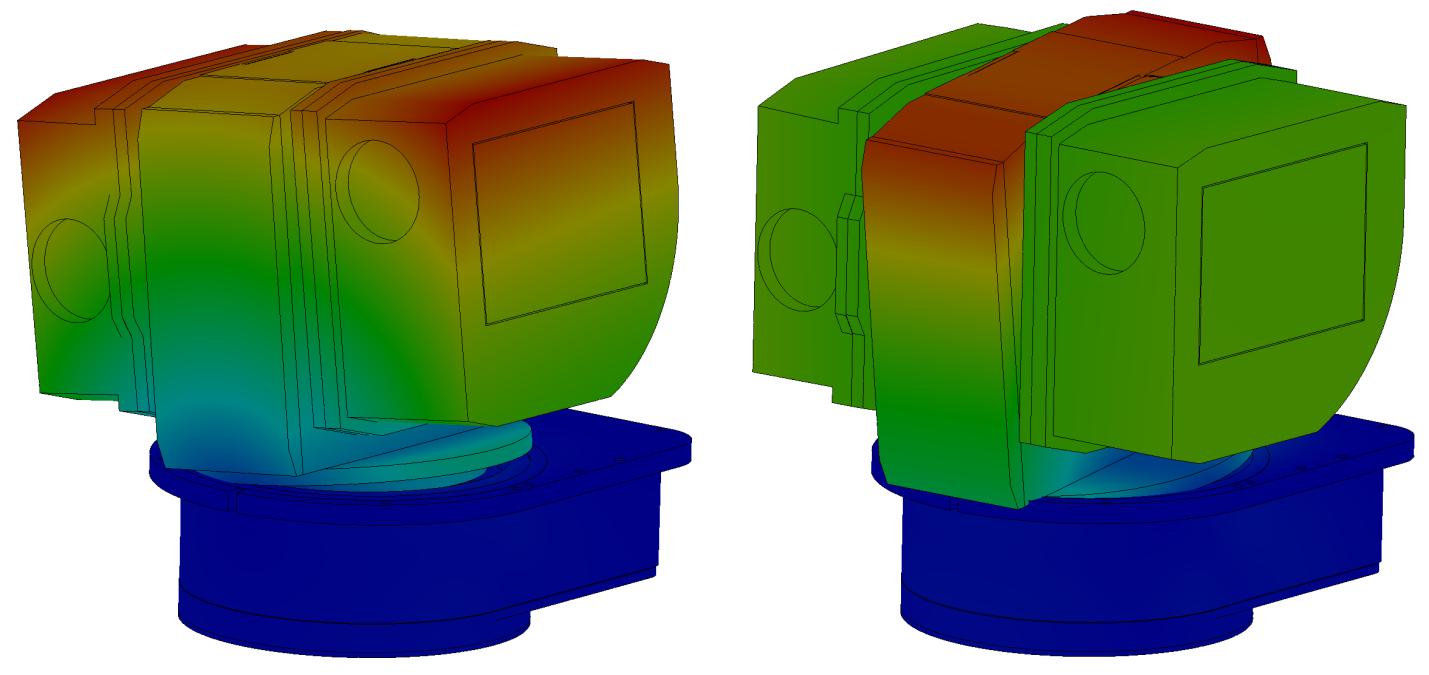
Рис. 6. Собственные формы прибора, соответствующие деформационным модам
Наиболее востребованными результатами являются напряжения, перемещения и ускорения конструкции и их отклики. Так, для случая синусоидальной вибрации в направлении оси Z, диаграммы эквивалентных напряжений, перемещений и ускорений по оси Z, а также графики амплитудно-частотных характеристик для характерных точек прибора представлены на рисунках 7…10.

Рис. 7. Эквивалентные напряжения по Мизесу
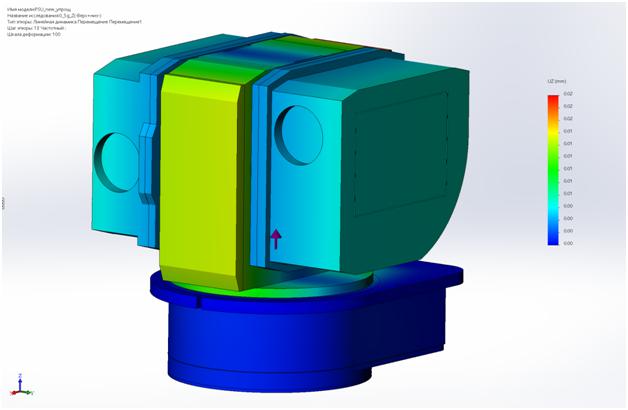
Рис. 8. Перемещения по оси Z
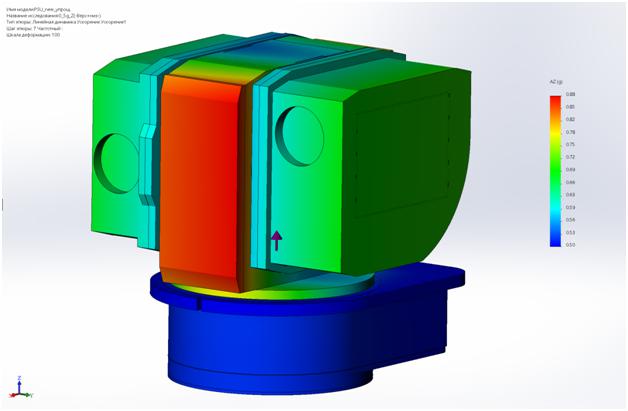
Рис. 9. Ускорения по оси Z

Рис. 10. График АЧХ в характерных точках
Аналогичный комплект результатов (кроме, естественно, АЧХ) формируется при анализе однократного удара, где параметры являются функцией времени.
В дальнейшем результаты динамических исследований могут быть использованы для оценки усталостной прочности. Исходными данными для усталостных расчётов будут значения напряжений, полученные в гармоническом или модальном исследованиях и соответствующие интересующей частоте или моменту времени.
Итогом динамических исследований прибора является сравнение собственных частот и ускорений, рассчитанных в модели Simulation, с экспериментальными значениями, полученными при вибрационных испытаниях опытного образца. Относительная погрешность составила не более 15 %.
Другим примером использования Simulation в динамическом анализе механических систем является расчёт параметров резонанса антенны радиолокационной станции (рис. 11).
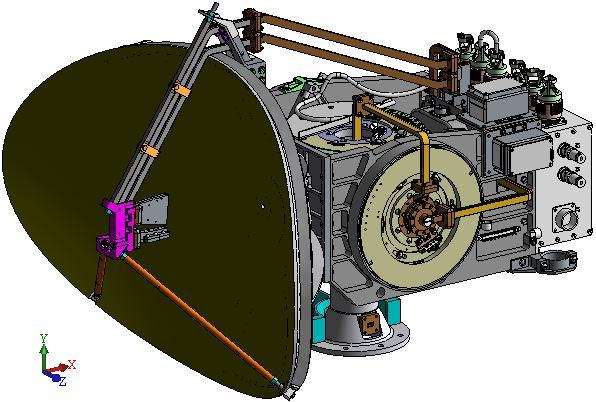
Рис. 11. Геометрическая модель антенны
В конструкции антенны присутствуют две группы подшипников. Первая содержит два подшипника с вертикальной осью и два – с горизонтальной, которые обеспечивают повороты корпуса с отражателем в горизонтальной и вертикальной плоскостях соответственно. Эти подшипники являются радиально-упорными со скосом на внутренней обойме (рис. 12).
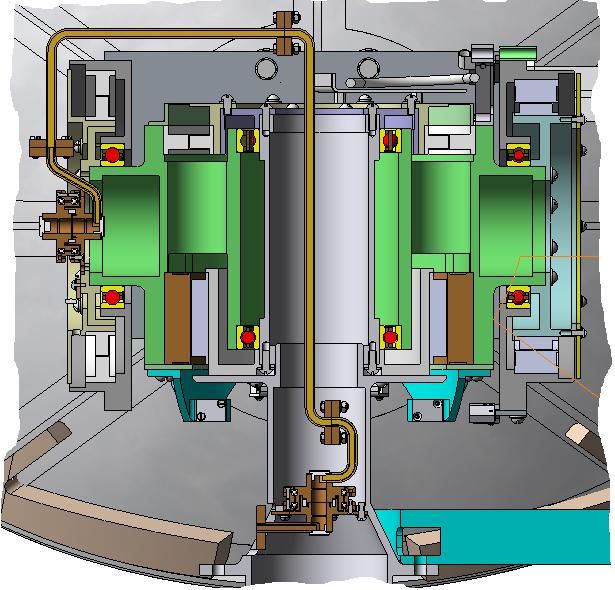
Рис. 12. Подшипники узла ориентации антенны
Подшипники второй группы, связывающие участки волноводов, являются нестандартными и состоят из четырёх незамкнутых колец, помещённых в квадратные кольцевые пазы и заполненных шариками (рис. 13).
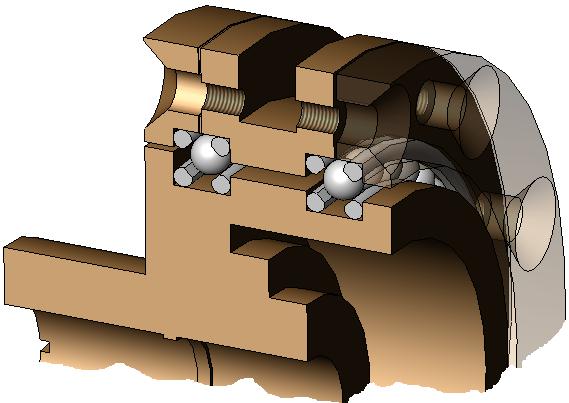
Рис. 13. Нестандартные подшипники волноводов
Как и в случае вышеописанного прибора, все подшипники были заменены виртуальными аналогами, для которых параметры радиальных и осевых жёсткостей были получены численной оценкой расчётных моделей средствами Simulation (рис. 14, 15). С учётом того, что конструктивные зазоры между элементами здесь отсутствуют, расчётные значения жёсткостей будут несколько завышены, а общий характер реакции будет линейным.

Рис. 14. Расчётные модели для оценки жёсткости подшипников узла ориентации

Рис. 15. Расчётные модели для оценки жёсткости подшипников волноводов
Поворот и стабилизация антенны в двух плоскостях осуществляется посредством электромагнитного привода, состоящего из двух пар роторов и статоров, исходные модели которых показаны на рисунке 16.
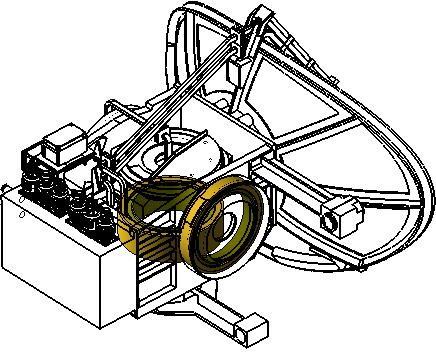
Рис. 16. Элементы электромагнитного привода
В реальной конструкции жёсткость привода при кручении, обусловленная реактивным моментом, является известной величиной. Для её имитации в расчётной модели наиболее подходящими будут Пружины (рис. 17), которые в Simulation могут воспринимать как осевую силу, так и крутящий момент. Крутильные жёсткости каждой пружины были подобраны посредством численного эксперимента.
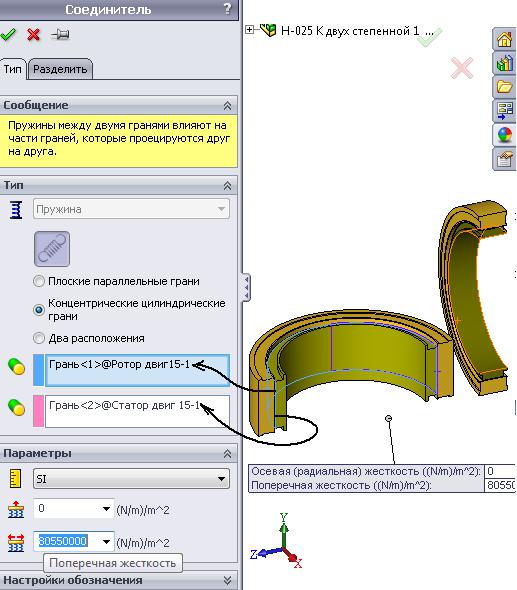
Рис. 17. Замена привода пружиной
Геометрическая модель антенны, адаптированная для расчёта, показана на рис. 18. Как видно, сохранена большая часть объектов, влияющих на массово-инерционные характеристики и жёсткость. Некоторые детали и узлы убраны из рассмотрения с последующей компенсацией тем или иным способом.
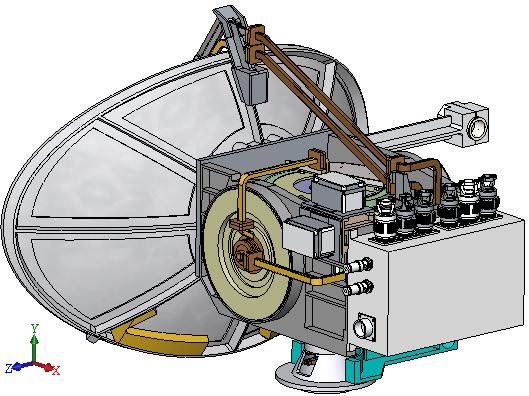
Рис. 18. Геометрическая модель антенны, адаптированная для расчёта
Часть деталей, не влияющих на жёсткость относительно рассматриваемых резонансных форм, заменены Удалёнными массами (рис. 19), что сохранило в модели не только их массы, но и моменты инерции.
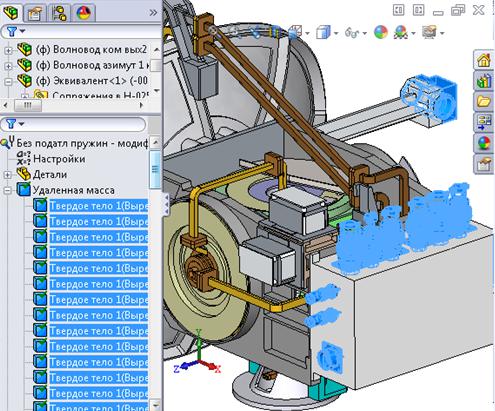
Рис. 19. Удалённые массы в модели
Элементы крепежа (болты, винты, гайки, шайбы) рационально заменить условностью Распределённая масса (рис. 20). Она также пригодна для имитации отсутствующего в исходной модели наполнения радиоэлектронного модуля. Эта сущность используется и для компенсации подшипников (их массовых характеристик), поскольку фактически они были исключены из модели с последующим вводом виртуальных аналогов.
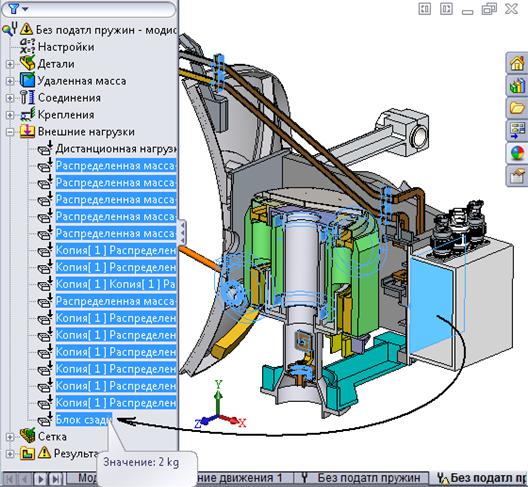
Рис. 20. Замена объектов распределёнными массами
Для достаточно жёстких (относительно смежных деталей) объектов корпуса сложной формы, наполненных некоторой начинкой, наилучшим решением является использование сущности Дистанционная масса (рис. 21), которая делает присоединённые грани идеально жёсткими и соединяет их в единое недеформируемое целое. При этом массово-инерционные характеристики объекта извлекаются непосредственно из модели в SOLIDWORKS.
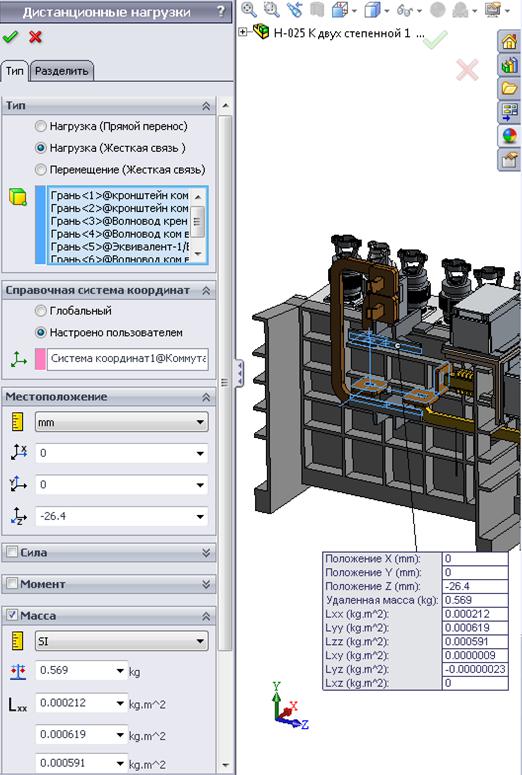
Рис. 21. Замена модуля дистанционной массой
Итогом подготовки расчётной модели антенны стала её конечно-элементная аппроксимация (рис. 22).
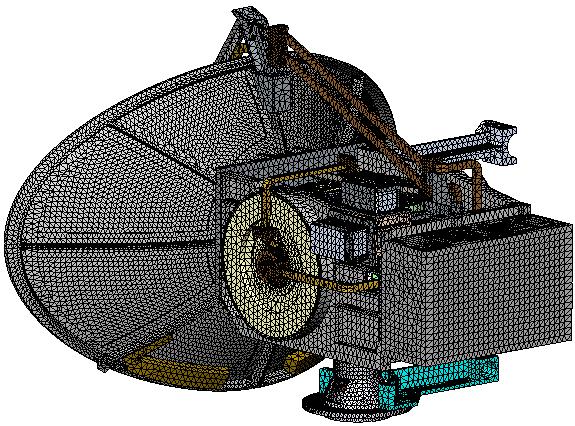
Рис.22. Конечно-элементная модель антенны
Собственные частоты и соответствующие им формы показаны на рисунках 23…25.
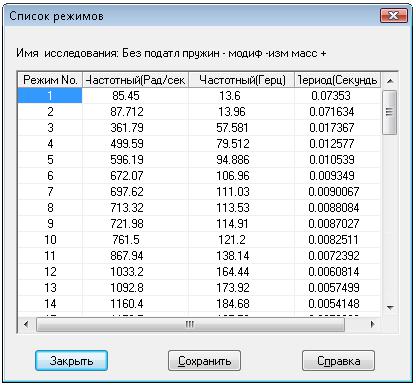
Рис. 23. Собственные частоты модели антенны
Как видно, первые две частоты имеют близкие значения и соответствуют кинематическим модам, которые образованы вращением корпуса с отражателем относительно неподвижной части конструкции (рис. 24).
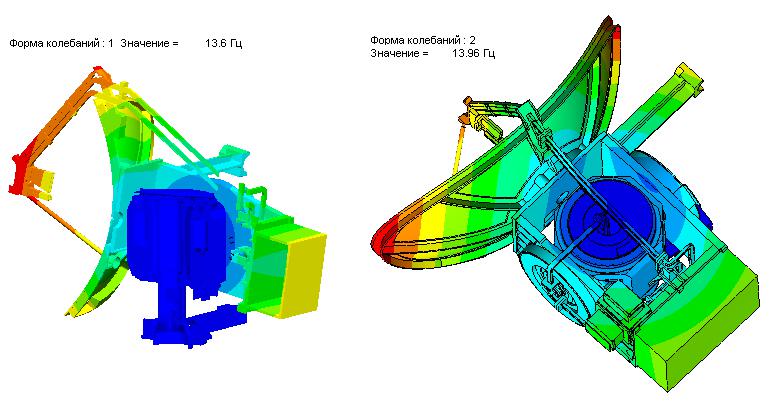
Рис. 24. Кинематические моды антенны
Третья и восьмая собственные формы (рис. 25) обусловлены деформацией (изгибом) волновода, имеющего вертикальные и горизонтальные колена в продольном и поперечном направлениях. Четвёртая, пятая и шестая получаются из-за перекашивания корпуса и изгибно-крутильной деформации отражателя, а седьмая обусловлена изгибом отражателя по одной (схлопывание) и двум волнам в горизонтальной плоскости.

Рис. 25. Деформационные моды антенны
Ещё один класс задач динамики, где желательно использовать численное моделирование до проведения затратного натурного эксперимента, является расчёт виброизолированных (амортизированных) систем, когда следует учитывать свойства демпферов и податливость объекта. Более того, современные методы моделирования допускают включение в расчётную модель оснастки, если её жёсткость сопоставима с изделием. Пример характерной модели показан на рис. 26.
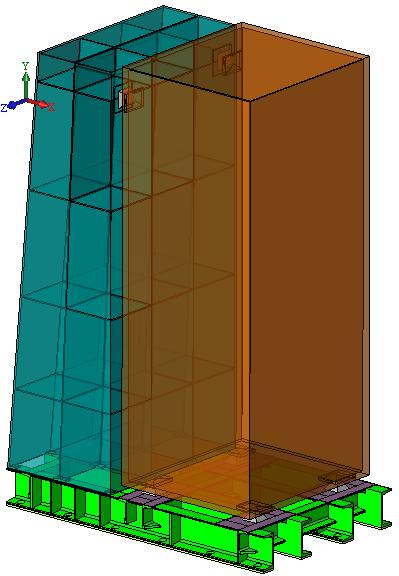
Рис. 26. Расчётная геометрическая модель приспособления с испытываемым объектом
Если проводится испытание на удар синусоидальным импульсом, как показано на рис. 27, то помимо собственных форм и частот (рис. 28) доступны отклики характерных точек по ускорениям (рис. 29), реакции в возбуждаемых опорах (рис. 30), а также «традиционные» перемещения, ускорения и напряжения.
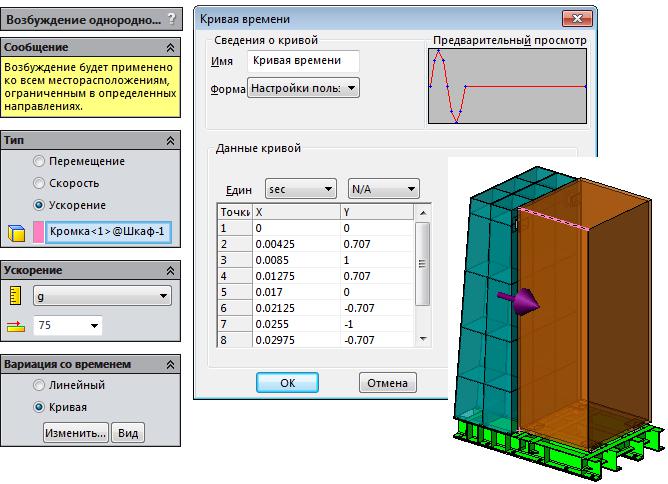
Рис. 27. Возбуждение основания ускорением с синусоидальным профилем
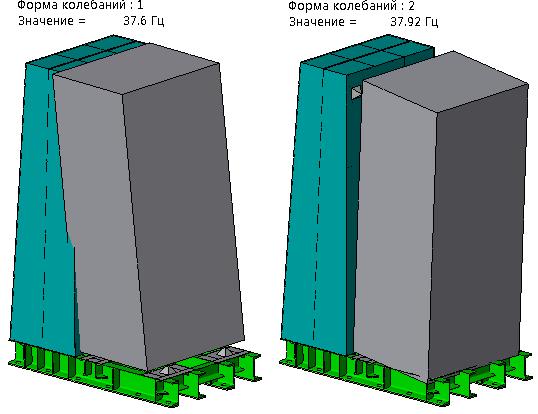
Рис. 28. Первая и вторая собственные формы
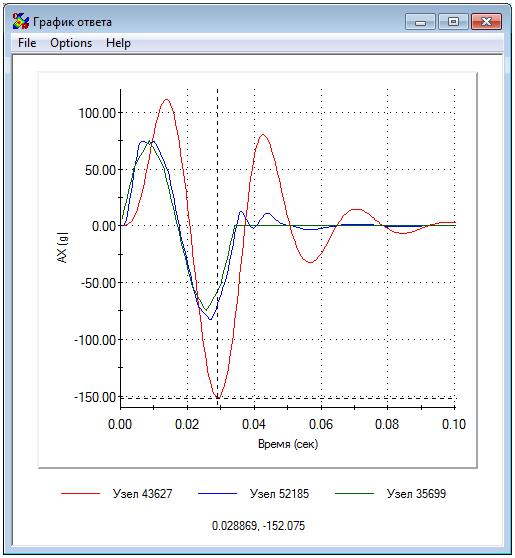
Рис. 29. Отклик по продольным ускорениям в узлах амортизатора и в вершине на основании
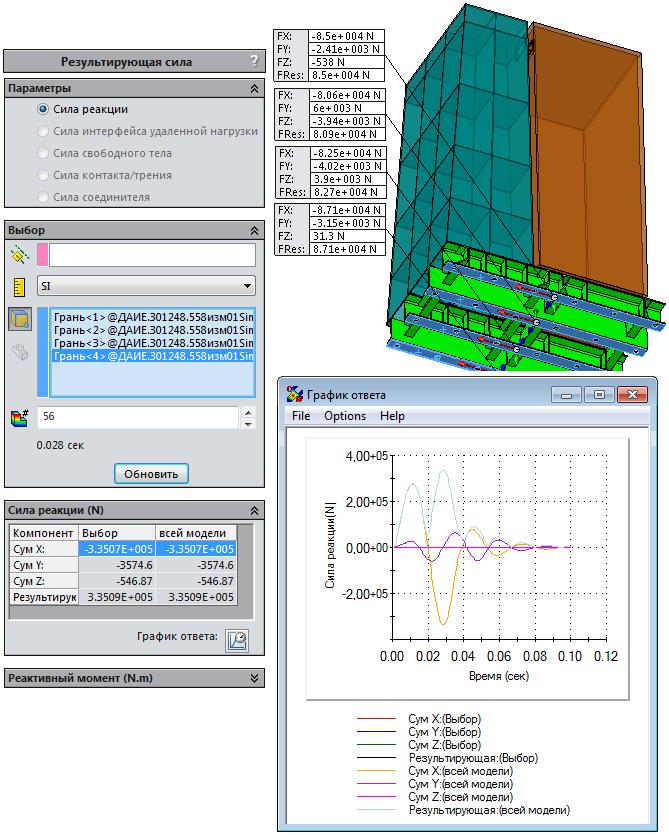
Рис. 30. Сила реакции и её компоненты в момент времени, соответствующий максимальной силе
|
Все права защищены. © 2004-2024 Группа компаний «ЛЕДАС»
Перепечатка материалов сайта допускается с согласия редакции, ссылка на isicad.ru обязательна.
Вы можете обратиться к нам по адресу info@isicad.ru.
|
|