
При проектировании машин и механизмов, перемещаемых в пространстве с помощью гидравлических или иных приводов, для контроля устойчивости проектируемого изделия мы используем возможности, которые нам предоставляет САПР. В ранее опубликованных материалах нами были в той или иной степени освещены некоторые приемы, которые использовались при разработке грузоподъемных машин. Тем не менее, хотелось бы более подробно изложить возможности оценки устойчивости проектируемого изделия при перемещении рабочих органов на примере достаточно простого сборочного узла.
На рис. 1 представлена спроектированная в КОМПАС-3D параметрическая трехмерная модель гидроцилиндра подъема телескопической стрелы.
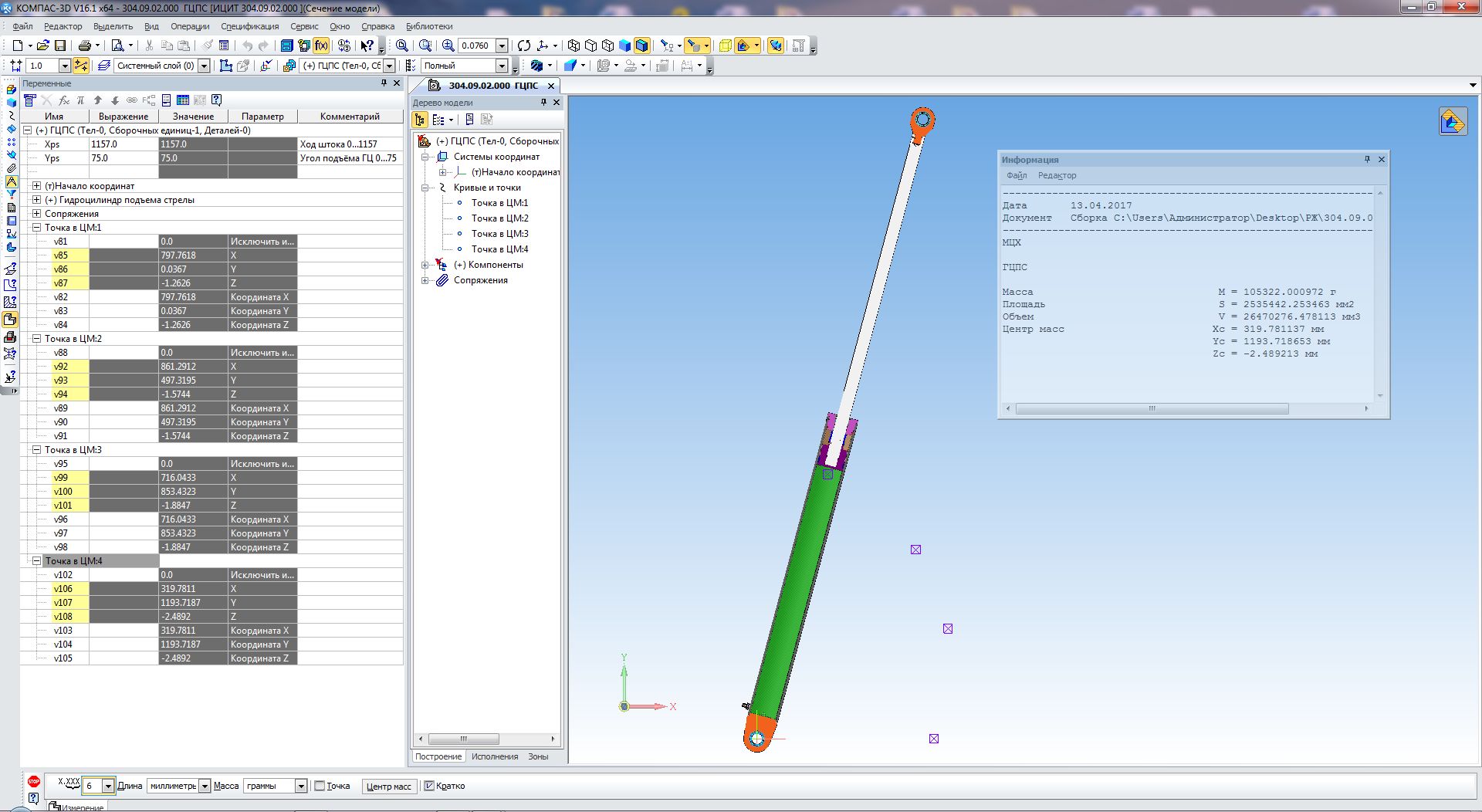
Рис. 1.
Нижняя часть гидроцилиндра закрепляется в проушинах подъемно-поворотного устройства, а верхняя – в проушинах основания нижнего колена стрелы. При выдвигании штока нижнее колено стрелы меняет свое положение относительно горизонта, тем самым перемещая вершину телескопической стрелы на необходимый для работы угол. Для более детального рассмотрения показанной на рис. 1 ситуации ниже представлены части этого рисунка отдельными фрагментами (рис. 2, 3, 4).
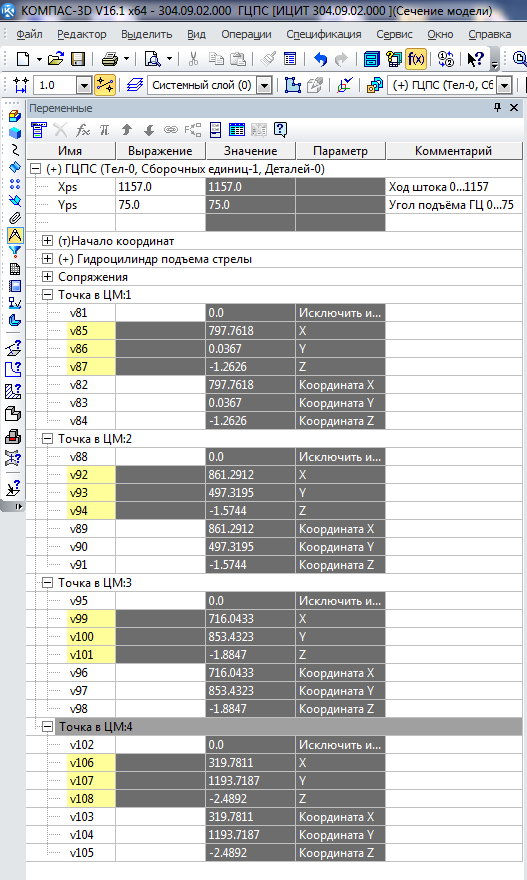
Рис. 2.
В таблице переменных параметрической трехмерной модели задаются длина выдвигания штока гидроцилиндра, угол его подъема, а также представляются результаты вычисления координат перемещаемого центра масс сборки. В качестве примера взяты четыре положения точки центра масс, полученные при перемещении компонентов гидроцилиндра в пространстве. Угол наклона гидроцилиндра определяется положением шарнирно соединенных частей рабочих органов грузоподъемной машины.
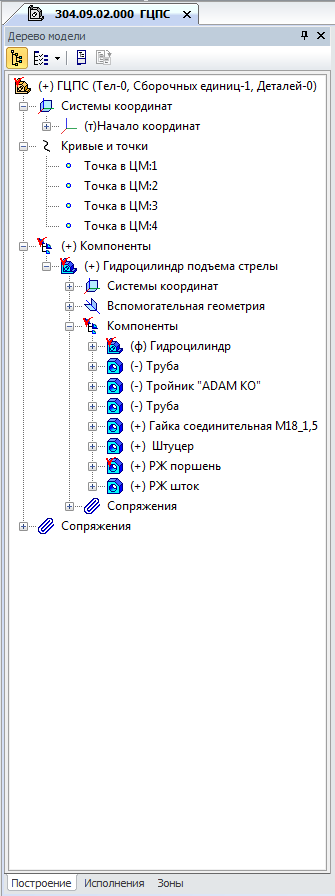
Рис. 3.
В дереве модели отражен состав сборки и порядок ее построения.
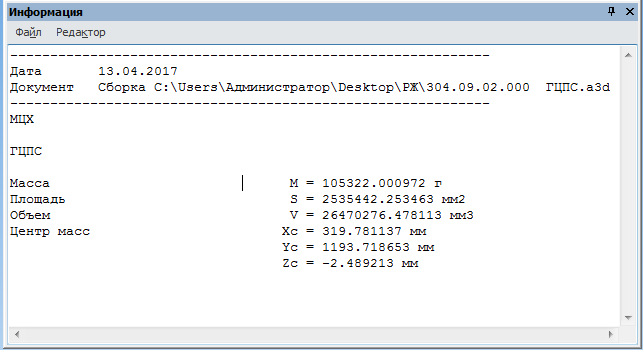
Рис. 4.
В таблице на рис. 4 показаны массо-центровочные параметры трехмерной модели в одном из положений, определяемым заданными параметрами в соответствующих строках таблицы переменных (рис. 2).
Далее на рисунках показаны фрагменты выбранных для демонстрации положений составных частей гидроцилиндра подъема телескопической стрелы при последовательном выдвигании штока.
Следует заметить, что гидравлическая рабочая жидкость (РЖ), циркулирующая в гидроцилиндре, также присутствует в модели. Зеленым цветом она окрашена в поршневой полости, а коричневым — в штоковой полости. Рабочая жидкость при разных положениях поршня меняет свой объем, который также учитывается при определении МЦХ модели при заданной плотности имитируемого жидкого вещества. Учет перемещения РЖ при работе гидроцилиндра дает возможность более точно определить положение центра масс в точке расчета.
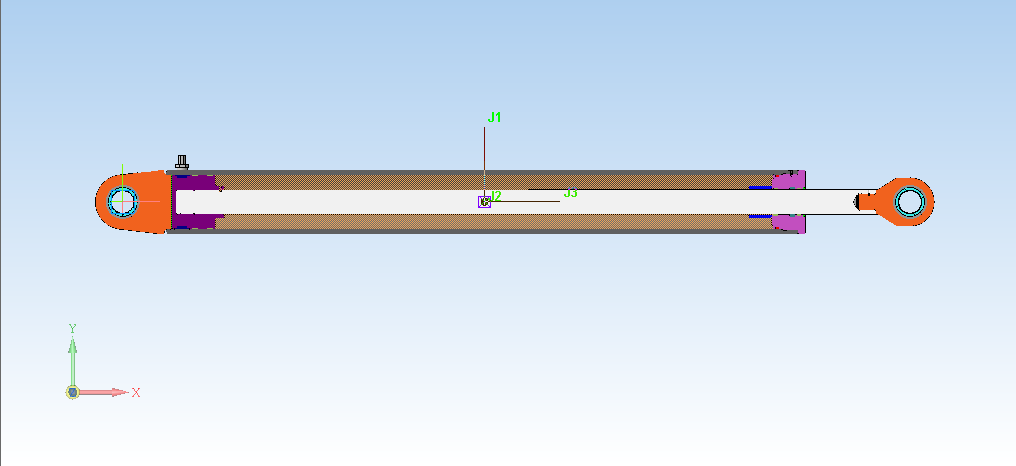
Рис. 5.
Рабочая жидкость горизонтально расположенного цилиндра имеется только в штоковой полости, гидроцилиндр сдвинут.
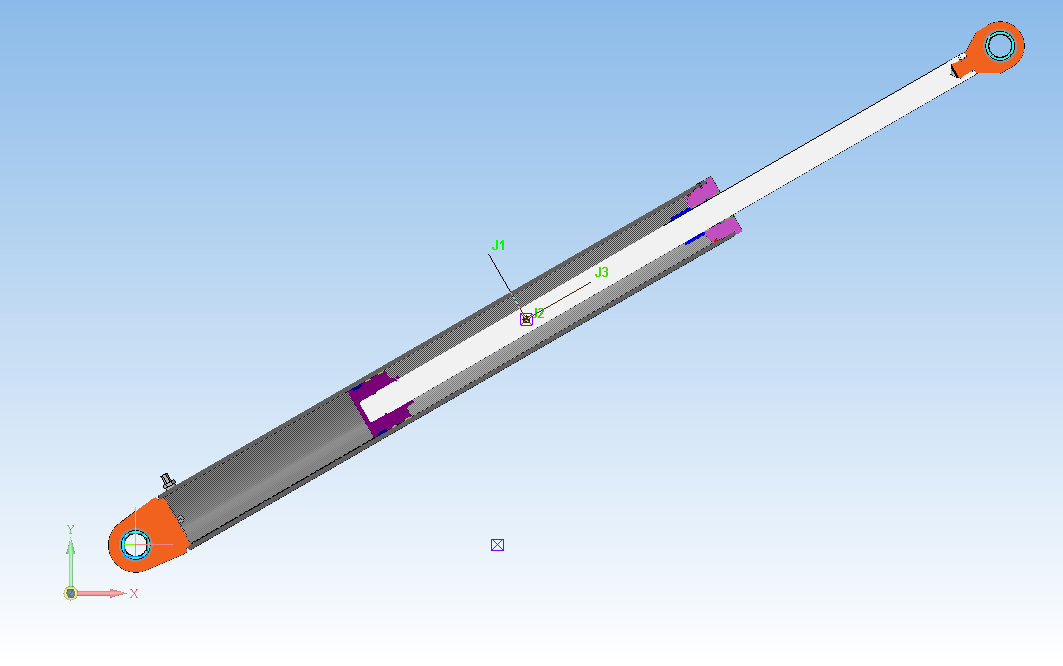
Рис. 6.
Рис. 6 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 30 градусов. РЖ присутствует в обеих полостях гидроцилиндра. Точками показаны положения центра масс настоящего и предыдущего положений.
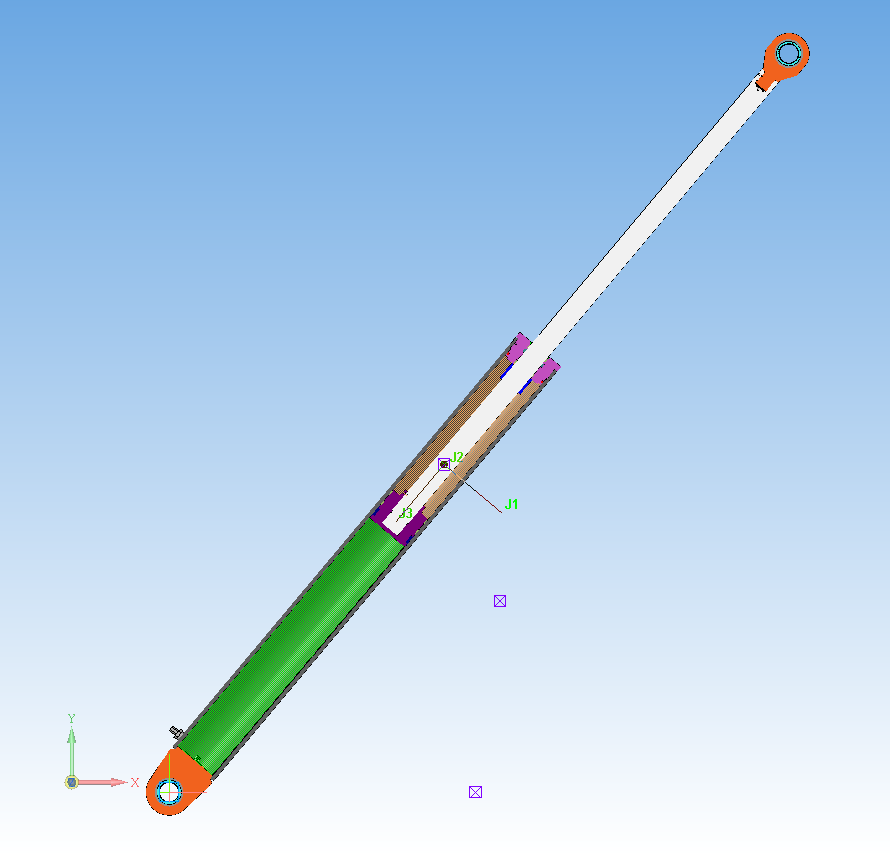
Рис. 7.
Рис. 7 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 50 градусов. РЖ присутствует в обеих полостях гидроцилиндра, а больший ее объем находится в поршневой полости. Точками показаны положения центра масс настоящего и предыдущих положений.
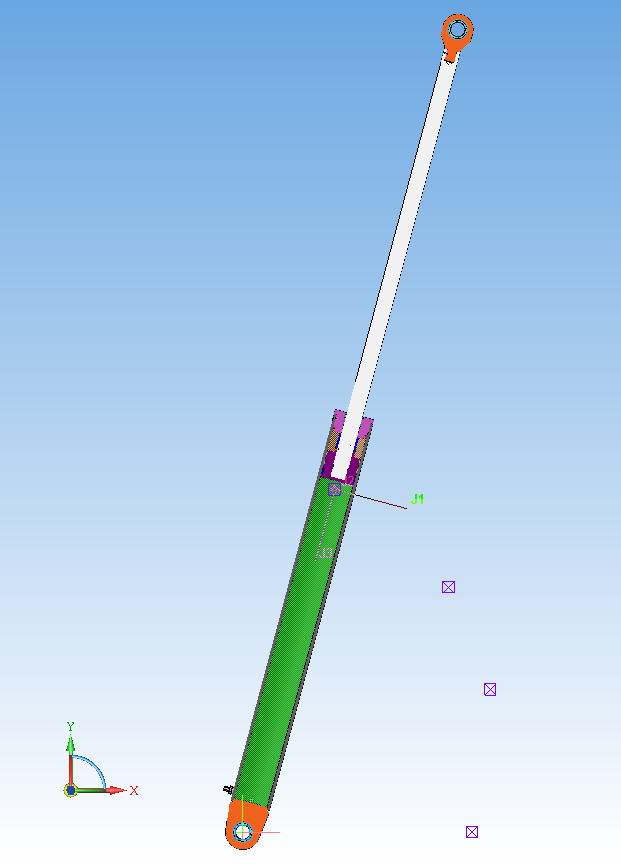
Рис. 8.
Рис. 8 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 75 градусов. РЖ присутствует в обеих полостях гидроцилиндра, а почти весь ее объем находится в поршневой полости. Точками показаны положения центра масс настоящего и предыдущих положений.
Имея большее количество точек положения центра масс гидроцилиндра, при необходимости, можно построить диаграмму перемещения этого центра масс. На примере приведенной трехмерной параметрической модели гидроцилиндра подъема телескопической стрелы грузоподъемной машины можно с достаточной точностью получить результат по перемещению центра масс при минимальных затратах времени. Кроме того, при наличии параметрической трехмерной модели всего изделия можно проследить перемещение центра масс при различных положениях рабочих органов на модели изделия. Таким образом, на этапе проектирования можно оценить грузовую устойчивость с использованием полной модели изделия в самых неблагоприятных положениях рабочих органов. Чтобы результаты, полученные с помощью трехмерной модели, были сравнимы с результатами натурных испытаний опытного образца, необходимо иметь достаточно насыщенную компонентами электронную модель изделия или лучше электронный двойник. Подобным образом мы учитываем перемещение центра масс на трехмерной модели телескопической стрелы с имитацией перемещения канатов выдвигания и сдвигания.
На практике наши специалисты довольны результатами, полученными в процессе применения методов предварительной оценки устойчивости всего разработанного ряда наших изделий с помощью параметрической ЭМИ.
Материалы для иллюстраций подготовил О. А. Бесов, ведущий инженер ООО «Пожарные Системы»