Компания “Формика” известна в России прежде всего, как организатор ИННОПРОМ – международной промышленной выставки, которая с 2010 года проводится ежегодно в Екатеринбурге. Впервые я поучаствовал в ИННОПРОМ в 2015 году и остался под большим впечатлением. Считаю, что по уровню проведения и качеству контента деловая программа мероприятия не уступает лучшим европейским и североамериканским образцам.
В прошлом году организаторы зарегистрировали свыше 50 000 посетителей, более 60% из которых – это профессиональная аудитория. В выставке участвуют все мировые лидеры промышленной отрасли, а для многих российских экспонентов ИННОПРОМ, которому в 2012 году Правительство РФ присвоило федеральный статус, стал частью GR-стратегии (Government Relations – взаимодействие с органами государственной власти).
Очевидно, что за успехом проекта стоит упорный труд множества талантливых людей, коллектива “Формики”, который возглавляет Максим Зверков, человек не сильно публичный, но достигший впечатляющих результатов в выставочной деятельности. Вот вам пример – павильон России, который курировала “Формика”, на ЭКСПО-2017 впервые за всю историю участия страны получил своеобразный “Оскар” – золотую награду Международного бюро выставок.
Максим Зверков у ресепшена ABAGY Robotic Systems. С его биографией можно ознакомиться на сайте Минпромторга
Отрадно, что Максим, начавший свою трудовую деятельность рядовым сотрудником одной из московских выставок и прошедший через становление собственного ивент-агентства, реализовавший несколько тысяч проектов и достигнув вершины (ИННОПРОМ называют не иначе как главной промышленной, торговой и экспортной площадкой страны), не остановился, а продолжил свой творческий путь в новом качестве, уже как создатель инновационного сервиса по производству изделий при помощи промышленных роботов под названием ABAGY Robotic Systems.
ABAGY поставляет робототехнические комплексы по модели сервисного контракта: компания самостоятельно закупает все оборудование, а промышленникам предлагает готовое решение «роботы + софт». Заказчик оплачивает только услуги по производству изделий, не финансируя ни закупку оборудования, ни пуско-наладку, ни сервисную поддержку.
Пользователь системы загружает в облако 3D-модель изделия, которое необходимо произвести. Система анализирует информацию, автоматически проводит расчеты, определяет порядок технологического процесса, генерирует программу, которая по сети направляется в контроллеры, управляющие промышленными роботами. Адаптироваться к реальному окружению, неточностям заготовок и их расположению помогает машинное зрение: различные датчики и сканеры позволяют системе оценить качество и положение заготовок, конфигурацию среды и на основании этих данных самостоятельно скорректировать производственный процесс перед запуском.
“Планета CAM” несколько раз обозревала CAM-системы, имеющие в своем составе модули для программирования промышленных роботов. Все они работают по принципу конвертации стандартных операций ЧПУ-обработки – технолог выбирает геометрию, назначает стратегии, которые затем адаптируются к кинематике роботов. В ABAGY, по словам разработчиков, процесс генерации УП происходит полностью автоматически.
Скепсис по отношению к декларируемой технологии и бизнес-модели (никто не делал подобного ни в Европе, ни в США) подогрел мой интерес к стартапу ABAGY Robotic Systems и, в итоге, свел меня с Максимом, который любезно ответил на вопросы и провел экскурсию по испытательному полигону, в котором, возможно, создается весомый элемент промышленного производства будущего.
Что означает ABAGY и кто придумал название?
Ничего, это новое слово. Придумали мы сами, конкретно я и мой помощник Елена Соколова. Искали слово, которого нет в природе. Мы искали новое понятие, ведь то что мы делаем – это принципиально новый подход с точки зрения технологий и экономического внедрения.
Ваш основной бизнес связан с выставочной деятельностью, и я понимаю, насколько вы загружены. Откуда у вас берутся силы ещё и на этот проект?
Сейчас мой основной бизнес – это роботы. Моё личное вовлечение здесь на 90% и только чуть-чуть выставочная деятельность. Мои коллеги меня оттуда вытеснили и делают всё сами, я там не очень нужен.
То есть ИННОПРОМ уже делают по накатанной?
Там есть команда. Уже не первый год мы делаем очень много в направлении строительства стендов, в направлении ивентов, моё участие там минимальное. Ныне все мои мысли заняты развитием роботехники.
Мы находимся в вашем собственном помещении? На самом здании красуется “ABB”…
Аренда. Здесь когда-то много лет назад сидела “ABB Автоматика”, по-моему. Здание долгое время пустовало, принадлежит Всероссийскому электротехническому институту, входящему в госкорпорацию “Росатом”. Сейчас они начали его сдавать, и мы первые, кто сюда заехал.
Это была лично ваша идея или в мире были аналоги? Было на что ориентироваться?
Мы не нашли пока аналогов. Мы принципиально делаем другое. Робототехническая ячейка не является основополагающей идеей, ячейка – это одна из форм, скажем так, установки. Могу рассказать, как ко мне пришла идея, дело было в мае 2016 года. Всё началась с того, что в России непропорционально мало устанавливается роботов по сравнению с ВВП машиностроительным. Если взять наш ВВП, посмотреть пропорции установки роботов у нас и в других странах, они непропорционально малы. За весь прошлый год установили 350 штук. Еще я немного приложил руку к созданию Национальной Ассоциации участников рынка робототехники и, соответственно, когда начал помогать им в развитии, начал размышлять: «А почему же так? В чем проблема?». И понял одну простую вещь: у нас много производства, мы много производим, но всё разное, у нас мало крупносерийной продукции.
Робот, изобретенный 40 (или более) лет назад, аналог человеческой руки (без кисти, если мы рассматриваем промышленный манипулятор), на данный момент в мире на единицу операций выгоднее, чем человек. То есть если взять большое количество операций, то он выгоднее в любом раскладе, по цене выиграет у кого угодно. Доказательством этого факта служит то, что весь автомобильный мир перешел туда. Почему? Идеальные заготовки, идеальные операции, операций много, роботы заменяют. Выгодно, абсолютно очевидно.
Просторный офис ABAGY и тестовая площадка, вмещающая людей и роботов
Дальше начинаем откручивать назад и видим, что же происходит с нашим миром, если за 40 лет всего 2 миллиона штук будет установлено в мире к концу этого года, если не ошибаюсь, по исследованиям Международной федерации роботехники. Это меньше 1% рабочих в мире, и мне показалось, что это диспропорция, то есть он выгоден с одной стороны, но с другой стороны – установлено мало. Я начал думать, в чем же проблема, и понял одну вещь, что робот во всём классный, кроме одного – он глупый, не умеет думать. Если человек может адаптироваться к внешним условиям и очень быстро воспринимать задачу, то роботу, в классической парадигме роботизации, это объяснить невозможно.
И пришла идея: есть 3D чертёж (модель) – набор цифр, по сути дела, и траектории робота – тоже набор цифр. Идея начиналась с того, что надо перевести этот набор цифр в этот набор цифр. Всё поддается алгоритмам. И была первая техническая идея, много гипотез, есть ли подобное в мире? Пока мы не нашли ни одного аналога, кто бы это делал.
Вы имеете в виду работу программного обеспечения?
Да. Есть по операциям фрезерования CAM-системы, которые делают автоматическое построение траекторий и по станкам с ЧПУ, и по роботам, если вам надо выбрать объем материала и каким-то инструментом пройти. Это очень ограниченное количество операций, очень узкое применение этому. Потом начали рассматривать гипотезу – делает ли это кто-то в мире? И если не делает, то почему? Может быть это недостижимо технологически? Начали постепенно в эту сторону двигаться и шаг за шагом снимать эти гипотезы. Где-то через полгода пришло понимание экономической схемы, которую мы сейчас используем, именно предоставление услуг.
Мы поняли, что тот софт, который мы разрабатываем, мы делаем, по сути, мозги для роботов, мы делаем так, чтобы они были адаптивные. Мы придумали очень гибкую возможность адаптироваться роботу к внешним условиям. Соответственно, в десятки раз понизили порог внедрения роботехники, куда выгодно её внедрять, от какого порога внедрять. Если сейчас выгодно, условно скажу, от миллиона долларов на операции за всё время, то мы сделали от 100 тысяч – уже точно можно внедрять.
Наш порог внедрения – 5 миллионов в год рублей с операций, производимых на одном робототехническом комплексе – очень мало, даже небольшие предприятия могут себе это позволить. И первые наши договоренности с двумя компаниями – это средние производства, которые делают разные, в классической парадигме роботехники, недоступные к роботизации операции.
Какие операции?
Два текущих проекта – это финальная обварка. По сути, это большие колонны (арматура длиной 15 метров, диаметром от 600 до 1200 мм) под металлобетон. Люди на них наваривают длинные арматурины, а нам надо распознать и заварить швы. Каждое изделие является уникальным, так как люди наваривают эти детали. Для них это операция сложная и затратная, для нас нет, поэтому получается выгоднее и дешевле, чем ручной труд. Единственное, с кем мы конкурируем, – это человеческий труд.
Максим Зверков демонстрирует Андрею Ловыгину пример сварки элементов изделия
Максим, вы начали говорить про уникальность софта. Мне интересно взглянуть на это всё. Насколько я знаю, в мире существует не менее десятка CAM-систем, который умеют делать похожие вещи. То есть мы выбираем 3D модель, технолог выбирает траекторию обработки, обычную CAM-овскую, там есть стандартные 5-осевые стратегии или операции перехвата, зажима, сварки, в том числе и совершенно спокойно можно это конвертировать, постпроцессировать и сделать программу для робота. И пока не совсем понятно, в чем именно уникальность?
Я не буду спорить. Лучше обсудить это с ребятами, они знают программу в деталях, они лучше ответят, в чем именно конкретное отличие. «Умеют программировать» – для этого вам нужен отдельный человек, в оффлайне – мы убираем человека, т.е. мы будем поставлять систему, в которой не добавляется на производство ни один человек. Мы убираем процесс программирования робота и наличие человека в этом процессе.
Я воспринимаю это как рекламный трюк, может я и не прав, но если мы хотим, например, сделать операцию фрезерования, то без человека точно не обойтись. А современные CAM-системы не могут это сделать автоматически. Вы реально можете это сделать уже без человека?
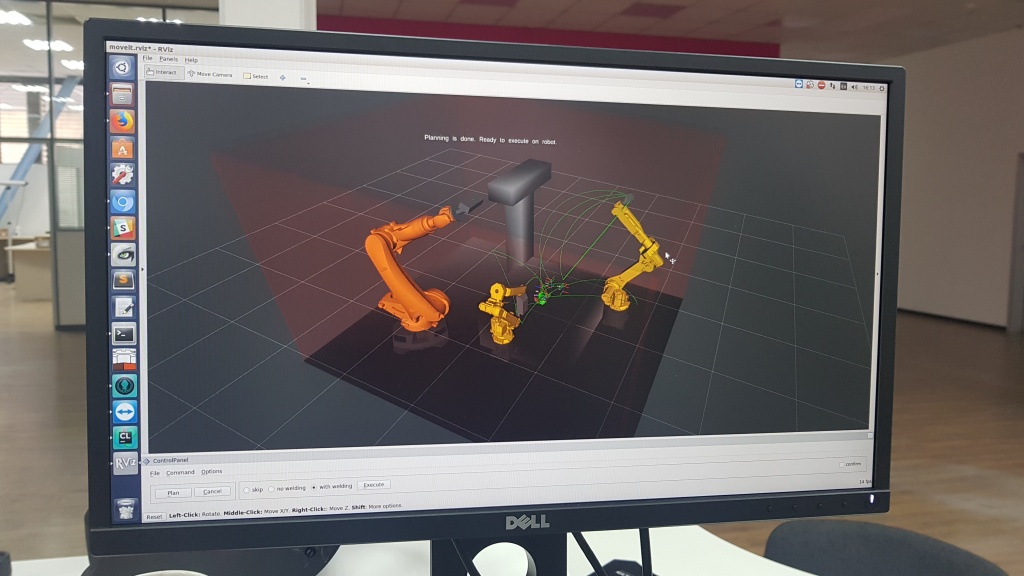
Мы сейчас не про фрезерование будем говорить, в первую очередь, я покажу вам сварку уникального объекта, который мы с вами сделаем, как привыкли люди в парадигме и в той парадигме, как сейчас они это делают, что роботы смогут адаптироваться к внешним условиям. Мы делаем так, чтобы можно было убрать человека. Это не рекламный трюк, это то, что мы делаем.
Они адаптируются не только программными средствами? Есть же машинное зрение или еще что-то?
Да, конечно. Есть машинное зрение, которое позволяет на лету принимать данные, пересчитывать траекторию.
Сварка двух пластин. Один робот поддерживает пластину вертикально, другой делает точный сварочный шов
Так это получается онлайн?
Исключительно онлайн. Что является продуктом? Мы ставим то, что называется ячейкой (широкое понятие) на территорию заказчика. Это наша техника, наши роботы, управляются нами по сети Интернет. Технолог на предприятии через свой интерфейс загружает 3D модель, система её анализирует, адаптируется к входным данным и отправляет уже траектории движения на роботов.
Но вы всё-таки согласуете с заказчиком то, что рассчитываете? У вас нет человека, который сидит и программирует?
Нет, конечно. Главное, что мы делаем – это софт, который, по сути, убирает человека из этого процесса. Машина сама просчитывает варианты и сама всё запускает. Если мы будем делать чертежи, наша экономика будет невыгодной.
Сколько человек у вас сейчас трудится в команде?
16 человек, 13 из них – программисты.
Вы всё сделали сами? Софт с нуля написали?
Да, сами. Когда мы начали делать решение, я сразу сказал, что есть идея и я не хочу ничего повторять из того, что в мире уже решено. Это глупо и неэффективно. Мы не в том положении, чтобы повторять уже решенное, поэтому будем делать что-то уникальное или собирать цепочку из чужих решений, если они есть. Мы для каждого робота написали свой RTP (Robot Transport Protocol) – тонкого клиента, который инсталлирован на каждом роботе и забирает все вычисления с роботов на компьютер. Текущие роботы обладают довольно малой вычислительной мощностью.
Программисты ABAGY за работой
Вопрос про бизнес-модель. Вы представили решение на ИННОПРОМ-2017. Прошло более полугода, и насколько я понимаю, до реальных контрактов ещё дело не дошло. Может, вы выбрали неверную для России бизнес-модель?
Правильный вопрос. На ИННОПРОМ мы выходили не с продуктом, а, по сути, с тестированием технологии. Это было в первую очень нужно для того, чтобы уточнять цели и задачи заказчика, потому что у меня есть своё производство, но оно не того вида, которое необходимо для понимания, и хотелось бы услышать другие мнения.
Процесс продаж стартовал только в октябре. На данный момент мы имеем десять подтвержденных сделок, цена заказчика устраивает, и я надеюсь, что в уже феврале-марте-апреле подпишем первые контракты и начнем поставки.
А цена имеется в виду за штуку?
За штуку, по сравнению с их ручным трудом. Мы не трогаем классическую роботизацию, автоматизацию. Мы идем туда, где есть ручной труд с разными заготовками, и пересчитываем с нашим софтом и системой, какую мы можем дать цену за изделие.
Продумана ли у вас партнёрская модель, интересно ли масштабироваться через партнёров, в том числе в Европе и США?
Во-первых, наше решение абсолютно глобально. Неважно где стоит ячейка, управляется она через интернет. Мы не хотим идти в интеграторский бизнес. Всем интеграторам мы предлагаем устанавливать ячейки. Мы не хотим быть инженерами, добавленную стоимость видим в софте и финансовом построении модели. Мы говорим интеграторам, что мы, с одной стороны, немного затрагиваем их территорию, с другой стороны, мы сделаем им рынок в десятки раз больше, чем тот, который у них есть сейчас. И мы с интеграторами обговариваем: приходит заказчик, мы просчитываем ячейку обратным счетом, мы высчитываем крайние габаритные размеры, говорим – вот такая ячейка, договариваемся с производителями оборудования, нам нужно, чтобы это кто-то отвёз, собрал, подключил и обслуживал. В наших планах не стоит сделать свою инженерную компанию, которая будет заниматься внедрением.
За что заказчик платит помимо стоимости детали? Какие расходы еще возникают?
Никаких. Ничего другого, если бы он это делал руками.
А электричество?
Электричество ложится небольшим процентом на деталь. Платит за интернет. Заказчик в нашей модели делает три вещи: он дает 3D чертежи (модели), заготовки и меняет расходники. В случае сварки, например, это газ и проволока. Нас на месте нет никого. Мы не изменяем его технологический процесс, мы заменяем несколько человек на эту операцию, повышаем качество и производительность.
То есть ответ на мой вопрос про модель... модель выбрана правильно?
Да, конечно.
Не считаете, что в США этот продукт был бы более востребован?
Считаю. Мы хотим начать движение в ту сторону, но я не люблю бежать впереди паровоза, предпочитаю говорить, когда всё уже сделано, случилось. Мы долго разрабатывали наше решение, не выходили никуда, на ИННОПРОМ были вынуждены выйти, потому что нужны были внешние контакты, а дальше мы не выходили опять же, пока не доработали до понимания, что мы можем установить промышленное решение. Сейчас у нас осталась отработка промышленной поставки, мы хотели сделать 1-2-5 поставок здесь, чтобы понять весь процесс, оценить свои ограничения и сложности и идти во внешний мир. Мы уже начали это движение за рубеж, первый шаг был сделан в Египет.
Поэтому стоит двигаться в сторону Запада. Мой личный опыт показывает, что “облака” в сфере САПР в России не прижились.
Возможно, да. У нас есть очень много разговоров. Главный разговор – продайте нам решение. Продайте нам софт, продайте нам роботов, всё хорошо, а вот решение продайте.
Так может быть так и сделать? Может вести “двойной” бизнес?
У нас очень долгий roadmap развития, мы понимаем, куда мы идем, и нам неинтересна продажа ни софта, ни оборудования. Это принципиальный для нас вопрос. Мы и так видим, что мы внедримся и пойдем. Мы видим и спрос, и желание, мы проверили гипотезу по цене сейчас уже на реальных заказчиках, на реальных деталях. У нас через две недели финальные тесты с деталями заказчика и, я надеюсь, мы выйдем на контракт и в апреле поставим, поэтому мы не собираемся менять модель.
Какие у вас планы с проектом на ИННОПРОМ-2018? Будет стенд?
В планах у нас сейчас показать “цифровую фабрику”: от пачки листов, дальше ЧПУ, раскрой и вот полностью весь автоматический процесс изготовления детали до покраски. Мы в первую очередь рассматриваем процесс сварки, финишной обварки и покраски. Хотели еще добавить “лазерник” и вот прямо от пачки листового железа до превращения в деталь полностью в автоматическом режиме без программирования.
Видели ли ваше решение FANUC, Siemens, производители роботов и что они по этому поводу вам сказали?
Siemens – не знаю. Это была одна из идей – сразу же выйти на робототехников. Все пятеро (FANUC, KUKA Robotics Rus, Yaskawa Nordic AB, Комау Руссия и ABB) со мной на ИННОПРОМ подписали соглашение.
Им просто выгодно продавать, я так понимаю, лизинг...
Разумеется, выгодно. Мы только сейчас дошли до лизинга. На ИННОПРОМе я их “мучил”, что как раз 3-летняя рассрочка и у меня остаются основания эту ситуацию продавливать, потому что то, куда они со мной могу продать, они сами продать никак не могут. Никаким другим способом продать в мелкие предприятия, в средние предприятия различные детали они не могут.
В целом положительная реакция?
Было несколько попыток сказать “только мы” (имеется в виду эксклюзивные условия сотрудничества), но мы вежливо сказали, что заинтересованы во всех пятерых и не готовы с кем-то одним работать.
Вы говорите, что хотите выйти на зарубежный рынок. А софт переведен на английский язык? Он готов к экспорту?
Софт не переведен. Его вообще не нужно переводить. Интерфейс у нас в процессе разработки. Это на самом деле будет очень простая вещь. Вы загружаете файл, крутите-вертите, говорите ОК. Там будет несколько параметров для технолога, если он вдруг захочет вмешаться.
То есть это не проблема?
Нет. Все силы R&D были направлены на совмещение физического мира с виртуальным. Если знаете, про роботов есть интересная история, они очень хорошо могут повторять движения из точки А в точку Б, но никто не решал задачку, как точно перевести в первый раз, вот первый раз перевести робота в какую-то точку – это очень сложная задача. Когда он эту точку запомнит, то потом он очень много раз повторит хорошо. А у нас этого второго движения нет. Мы каждый раз приводим робота заново в эту первую точку. Эта задача решается установкой первой точки с пульта, но так как у нас нет пульта и нет этого программирования, нам пришлось решить задачу калибровки всего оборудования, все роботы должны понимать окружение, где они находятся, чтобы они могли не сталкиваться и просчитывать все траектории. Все камеры должны быть откалиброваны, должна быть единая система координат. И вопрос калибровки всего оборудования в таком ключе пока никто не решал, кроме нас. Мы очень долго искали это решение на рынке, но не нашли, пришлось самим делать.
Одна из проблем программирования роботов заключается в том, что у них 6 и более осей, и есть зоны, в которые лучше не заходить, сингулярность…
Есть зона, в которую они не приходят, точка деления на 0, где они с ума сходят, – это мы всё для себя решили. Точка сингулярности, да, не знают роботехники что с ней делать, и роботы тоже. Но если серьезно говорить, то технолога мы не заменяем. Тот режим операций, который нужен, технолог как говорил, так и говорит. Наше достижение в том, что мы позволяем адаптироваться к траекториям на лету.
Есть ли у всего этого цифровой двойник? Можно ли заранее это всё смоделировать?
Конечно, без этого работать нельзя, и мы с этого начали. Сначала всё было построено в цифре, и роботы учились работать в цифре, а потом у нас была большая пауза для того, чтобы реальный мир привести к цифре.
Каким вы видите ABAGY через 5 лет?
Я воздержусь от ответа – не люблю загадывать, но пока все наши гипотезы говорят о росте компании.
Интерфейс отладочного программного обеспечения. Пользователь, скорее всего, этого не увидит – его общение с системой сведется к загрузке 3D моделей в Облако
Из кабинета перемещаемся в производственное помещение, в котором располагается ячейка. Здесь же находится инженерная группа, занятая испытаниями. Появилась возможность увидеть все собственными глазами. Дмитрий Голицын, технический директор проекта, проводит тестовую симуляцию процесса сварки пластин и включается в разговор
На каждом роботе стоит тонкий клиент, который позволяет нам все вычисления перенести на сервер, и все вычисления происходят там. Клиент – это ваша разработка?
Да, это наша разработка, для каждого робота своя. Это то, что мы называем RTP (Robot Transport Protocol), ставим на робота, забираем с него все вычисления. Это я так, по-простому. Вот прообраз ячейки. Это же позволяет нам подключить бесконечное количество вводного оборудования, делать адаптируемым само изделие.
Вот лежат две заготовки, камера. Сейчас, по сути дела, они как-то лежат. У нас есть зона, по которой видит камера, я вот двигаю, показываю, что заготовки будут лежать, как угодно, то есть система не знает, как они лежат. Я их как-то подвигал, чтобы вы поняли, что мы не заранее прописали места – мы сейчас убираем первую парадигму классической роботизации, что детали должна лежать в идеальных местах. Сделали фотографию. Дальше, вот наша виртуальная ячейка, она отстроена, все ограничения, все вводные для всех роботов, вот тут другой робот, который у нас не задействован, они понимают своё окружение и могут от своего окружения обсчитывать все возможные траектории.
ПО визуализации ваше?
Визуализация частично наша. Софт весь наш, который обсчитывает траектории и решает задачи планирования. Понятно, что мы используем какие-то сторонние технологии для визуализации. Мы загружаем некоторую задачу, задача формулируется в виде чертежа, в данном случае это просто две металлические пластинки, одна стоит на другой, и нужно приварить их. Вот задача. На самом деле, если бы мы это повернули вот так, задав ему новое изделие, для него это было бы абсолютно такое же задание, как загрузил сейчас Дима. Мы нажимаем на одну кнопку, вот эти пластины появились в сцене так, как их распознала камера, и сейчас мы видим процесс автоматического построения, решение задач планирования, какой робот должен взять деталь, куда он должен её переместить, чтобы сварщику было удобно заварить, вот оно всё посчиталось.
Но не требуется ли какая-то оптимизация?
Я точно не могу сказать, что мы сейчас находим оптимальное решение. Простор для оптимизации, безусловно, еще есть. И траектория, возможно, не сама оптимальная, но это всё равно в разы быстрее, чем делать это руками. Задачу оптимизации мы будем решать, она есть у нас в планах, только сейчас она нам не нужна. Скорость, с которой все это будет сделано, компенсирует все возможные недостатки. Большая у робота проблема, что он стоит, если мы говорим про разные детали. Первая парадигма – детали лежат свободно, вторая парадигма – чертеж изменен нами на лету, вот мы им выдаем вводную... и мы построили задачу. После того все траектории сгенерированы, нам достаточно нажать одну кнопку, и роботы попробуют сделать изделие.
Из такого вот сервера отправляется заказчику команда?
Безусловно, у заказчика прямо около ячейки стоит компьютер, на котором всё это дело исполняется, чтобы не зависеть от интернета непосредственно в ходе выполнения. Вот он нашел одну деталь, нашел другую, поставил их ровно, как сказали по заданию. На пульте только красная кнопка, чтобы остановить, и скорость передвижения робота. Никакого программирования в классическом понимании здесь нет. Все делается автоматически.
Вот мы сейчас руками двигаем в приблизительное положение деталь, мы ее ставим так, как робот не знает. Или ставим кривую деталь, с неидеальным швом. У нас стоит датчик слежения за швом, датчиков может быть много. Датчик сейчас сосканирует точки, система перестроит траектории и пройдет по нужному шву.
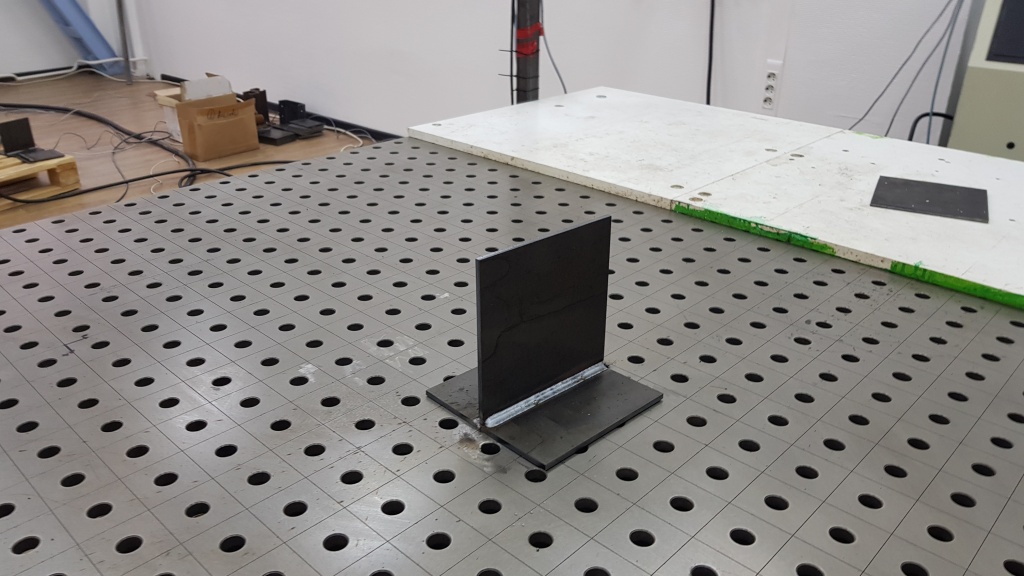
Результат сварки пластин роботами
Все эти датчики – это же вы их проектируете и инсталлируете?
Да, тоже мы.
Сколько времени уходит на установку подобной ячейки?
Несколько часов. Но вообще это будет быстро – через несколько месяцев уберем процесс калибровки, доведем его до автоматизма. Уже датчики, камера калибруются автоматически. То есть мы придем к тому, что не нужно будет выезжать на место, мы будем калибровать систему отдельно.
Максим, благодарю вас за содержательное интервью и желаю больших успехов ABAGY!
Редакция PlanetaCAM выражает благодарность Антону Атрашкину (директору деловой программы ИННОПРОМ) за помощь в организации интервью.